1. DFT of given sequence using MATLAB
Fourier analysis is a family of
mathematical techniques, all based on decomposing signals into sinusoids. The
discrete Fourier transform (DFT) is the family member used with digitized signals. A signal can be
either continuous or discrete, and it can be either periodic or Aperiodic. The combination of these two features generates the four categories, described below
·
Aperiodic-Continuous
This includes, decaying exponentials
and the Gaussian curve. These signals extend to both positive and negative
infinity without repeating in a
periodic pattern. The Fourier Transform for this type of signal is simply
called the Fourier Transform.
·
Periodic-Continuous
This includes: sine waves, square
waves, and any waveform that repeats itself in a regular pattern from negative
to positive infinity. This version of the Fourier transform is called the Fourier series.
·
Aperiodic-Discrete
These signals are only defined at
discrete points between positive and negative infinity, and do not repeat
themselves in a periodic fashion. This type of Fourier transform is called the Discrete Time Fourier Transform.
·
Periodic-Discrete
These are discrete signals that
repeat themselves in a periodic fashion from negative to positive infinity.
This class of Fourier Transform is sometimes called the Discrete Fourier
Series, but is most often called the Discrete
Fourier Transform.
Discrete
Fourier Transform Computation:
Mathematical Expression to calculate
DFT for an input sequence x(n)

MATLAB Code
clf;
a=[1 1 2 2];
x=fft(a,4);
n=0:3;
subplot(2,1,1);
stem(n,abs(x));
xlabel('time index n');
ylabel('Amplitude');
title('amplitude obtained by dft');
grid;
subplot(2,1,2);
stem(n,angle(x));
xlabel('time index n'); ylabel('Amplitude');
title('Phase obtained by dft');

2. Frequency response of LTI system given in transfer function
/ difference equation:
% Frequency Response of LTI system using difference equation
clf;
num=input('numerator
coefficiuents b = ');
den=input('denominator
coefficients a = ');
w = -pi:8*pi/511:pi;
h = freqz(num, den, w);
% Plot the DTFT
subplot(2,1,1);
plot(w/pi,abs(h));
grid title('Magnitude of H')
xlabel('\omega /\pi');
ylabel('Amplitude');
subplot(2,1,2)
plot(w/pi,phase(h));
grid title('phase of
H') xlabel('\omega /\pi');
ylabel('phase');
Result:
freqresp
numerator
coefficiuents b = [2 1]
denominator
coefficients a = [1 -0.6]

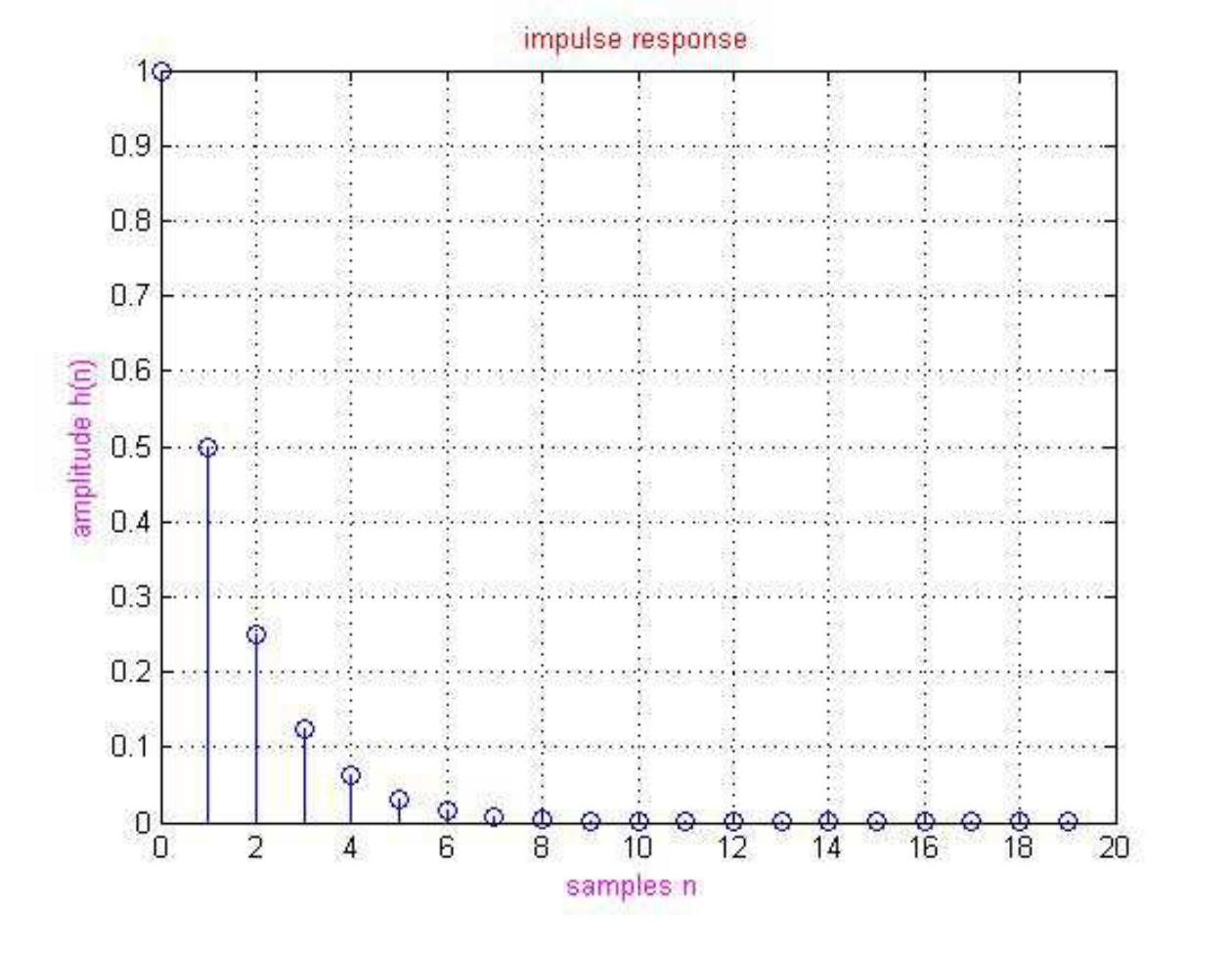
3. Impulse response of a given system

A discrete time LTI system (also
called digital filters) as shown in Fig.2.1 is represented by
·
A
linear constant coefficient difference equation, for example,
y[n] + a1 y[n -1] - a2 y[n - 2] = b0 x[n] + b1 x[n -1] + b2 x[n - 2];
·
A system function H(z) (obtained by
applying Z transform to the difference Equation
H (z) = Y(z) = b0+b1z-1+b2z-2
X(z) 1+a1z-1+a2z-2
Given the difference equation or
H(z), the impulse response of the LTI system is found using filter or impz MATLAB functions.
MATLAB Program:
b=input('numerator coefficients
b = ');
a=input('denominator
coefficients a = ');
n=input('enter length n = ');
[h,t] = impz(b,a,n);
disp(h);
stem(t,h);
xlabel('samples n ','color', 'm');
ylabel('amplitude h(n)','color','m');
title('impulse response','color','r');
grid on;
Result:
numerator
coefficients b = [1]
denominator
coefficients a = [1 -0.5]
enter
length n = 20
1.0000 0.5000 0.2500 0.1250 0.0625 0.0313 0.0156 0.0078
0.0039 0.0020 0.0010 0.0005 0.0002 0.0001 0.0001 0.0000
0.0000 0.0000 0.0000 0.0000
4. Implementation
of N point FFT:
Discrete Fourier Transform (DFT) is
used for performing frequency analysis of discrete time signals. DFT gives a
discrete frequency domain representation whereas the other transforms are
continuous in frequency domain.
The N point DFT of discrete time signal x[n] is given by the
equation
N-1
|
- j 2pkn
|
|
X (k )
= Σ x[n]e
|
N
|
; k = 0,1,2,....N -1
|
n =0
|
Where
N is chosen such that N ³ L
, where L=length of x[n].
The inverse DFT allows us to recover
the sequence x[n] from the frequency samples.
1
|
N -1
|
j 2pkn
|
||
x[n] =
|
Σ x[n]e
|
N
|
; n = 0,1,2,....N -1
|
|
N k =0
|
||||
X(k) is a
complex number (remember ejw=cosω + jsinω). It has both magnitude
and phase which are plotted versus k. These plots are magnitude and phase
spectrum of x[n]. The ‘k’ gives us the frequency in formation.
Here k=N in
the frequency domain corresponds to sampling frequency (fs). Increasing N,
increases the frequency resolution, i.e., it improves the spectral
characteristics of the sequence. For example if fs=8kHz and N=8 point DFT, then
in the resulting spectrum, k=1 corresponds to 1kHz frequency. For the same fs
and x[n], if N=80 point DFT is computed, then in the resulting spectrum, k=1
corresponds to 100Hz frequency. Hence, the resolution in frequency is
increased.
Since N ³ L
, increasing N to 8 from 80 for the same x[n] implies x[n] is still the same
sequence (<8), the rest of x[n] is padded with zeros. This implies that
there is no further information in time domain, but the resulting spectrum has
higher frequency resolution. This spectrum is known as ‘high density spectrum’
(resulting from zero padding x[n]). Instead of zero padding, for higher N, if
more number of points of x[n] are taken (more data in time domain), then the
resulting spectrum is called a ‘high resolution spectrum’.
Algorithm:
1. Input the sequence for which DFT is
to be computed.
2.
Input the length of the DFT required
(say 4, 8, >length of the sequence).
3.
Implement FFT algorithm.
4.
Plot the magnitude & phase
spectra.
MATLAB Program:
% This programme is for fast fourier
transform in matlab.
% Where y is the input argument and N is the
legth of FFT . Let
% y = [1 2 3 4 ];
y=input('enter input sequence:');
N= input('size of fft(e.g . 2,4,8,16,32):');
n=length(y);
p=log2(N);
Y=y;
Y=[Y, zeros(1, N - n)];
N2=N/2;
YY = -pi*sqrt(-1)/N2;
WW = exp(YY);
JJ = 0 : N2-1;
W=WW.^JJ;
for L = 1 : p-1
u=Y(:,1:N2);
v=Y(:,N2+1:N);
t=u+v;
S=W.*(u-v);
Y=[t ; S];
U=W(:,1:2:N2);
W=[U ;U];
N=N2;
N2=N2/2;
end;
u=Y(:,1);
v=Y(:,2);
Y=[u+v;u-v];
Y
subplot(3,1,1)
stem(y);grid
title('input sequence y')
xlabel('n');
ylabel('Amplitude');
subplot(3,1,2)
stem(abs(Y));grid
title('Magnitude of FFT')
xlabel('N');
ylabel('Amplitude');
subplot (3,1,3)
stem(angle(Y));grid
title('phase of FFT')
xlabel('N');
ylabel('phase');
Result:
>> fft1
enter input sequence:[1 2 3 4 5 6 7]
size of fft(e.g . 2,4,8,16,32):8
Y =
28.0000
-9.6569 + 4.0000i
-4.0000 - 4.0000i
1.6569 - 4.0000i
4.0000
1.6569 + 4.0000i
-4.0000 + 4.0000i
-9.6569 - 4.0000i

Power Density Spectrum Using MATLAB
Algorithm:
1.
Generate a signal
2.
find DFT of the signal
3.
PSD is given by the formula
¥
y(n) = Σ x(k ) x(k - n)
k =-¥
where n = - (N-1)
to (N-1)
PSD= |Y(w)|2
Where Y(w) = fft of y(n)
Matlab program
% computation of psd
of signal corrupted with random noise
t = 0:0.001:0.6;
x = sin(2*pi*50*t)+sin(2*pi*120*t);
y = x + 2*randn(size(t));
figure,plot(1000*t(1:50),y(1:50))
title('Signal
Corrupted with Zero-Mean Random Noise')
xlabel('time
(milliseconds)');
Y = fft(y,512);
%The power
spectral density, a measurement of the energy at various frequencies, is:
Pyy = Y.* conj(Y) / 512;
f = 1000*(0:256)/512;
figure,plot(f,Pyy(1:257))
title('power spectrum of
y');
xlabel('frequency
(Hz)');

Implementation
of FIR filter to meet given specifications
There are two types of systems –
Digital filters (p erform signal filtering in time domain) and spectrum
analyzers (provide signal representation in the frequency domain). The design
of a digital filter is carried out in 3 steps- specifications, approximations
and implementation.
DESIGNING AN FIR FILTER (using
window method):
Method I:
Given the order N, cutoff frequency fc, sampling frequency
fs and the window.
Step 1: Compute the digital cut-off
frequency Wc (in the range -π < Wc < π, with π corresponding to fs/2) for
fc and fs in Hz. For example let fc=400Hz, fs=8000Hz
Wc = 2*π* fc / fs =
2* π * 400/8000 = 0.1* π radians
For
MATLAB the Normalized cut-off frequency is in the range 0 and 1, where 1 corresponds
to fs/2 (i.e.,fmax)). Hence to use the MATLAB commands wc = fc / (fs/2) =
400/(8000/2) = 0.1
Note: if the cut off frequency is in
radians then the normalized frequency is computed as
wc = Wc/ π
Step 2:
Compute the Impulse Response h(n) of the required FIR filter using the given
Window type and the response type (lowpass, bandpass, etc). For example given a
rectangular window, order N=20, and a high pass response, the coefficients
(i.e., h[n] samples) of the filter are computed using the MATLAB inbuilt command ‘fir1’ as
h =fir1(N, wc , 'high', boxcar(N+1));
Note: In theory we would have
calculated h[n]=hd[n]×w[n], where hd[n] is the desired impulse response (low
pass/ high pass,etc given by the sinc function) and w[n] is the window
coefficients. We can also plot the window shape as stem(boxcar(N)).
Plot the frequency response of the
designed filter h(n) using the freqz function and observe the type of response
(lowpass / highpass /bandpass).
Method 2:
Given the pass band (wp in radians)
and Stop band edge (ws in radians) frequencies, Pass band ripple Rp and
stopband attenuation As.
Step 1: Select the window depending
on the stopband attenuation required. Generally if As>40 dB, choose Hamming
window. (Refer table )
Step 2: Compute the order N based on
the edge frequencies as
Step 3: Compute the digital cut-off
frequency Wc as
Wc=(wp+ws)/2
Now compute the normalized frequency
in the range 0 to 1 for MATLAB as
wc=Wc/pi;
Note: In step 2 if frequencies are
in Hz, then obtain radian frequencies (for computation of tb and N) as
wp=2*pi*fp/fs, ws=2*pi*fstop/fs,
where fp, fstop and fs are the passband, stop
band and sampling frequencies in Hz
Step 4:
Compute the Impulse Response h(n) of the required FIR filter using N, selected
window, type of response(low/high,etc) using ‘fir1’ as in step 2 of method 1.
MATLAB IMPLEMENTATION
FIR1 Function
B = FIR1(N,Wn) designs an N'th order
lowpass FIR digital filter and returns the filter coefficients in length N+1
vector B. The cut-off frequency Wn must be between 0 < Wn<1.0, with 1.0
corresponding to half the sample rate. The filter B is real and has linear
phase, i.e., even symmetric coefficients obeying B(k) = B(N+2-k), k =
1,2,...,N+1.
If Wn is a two-element vector, Wn =
[W1 W2], FIR1 returns an order N bandpass filter with passband W1 < W <
W2. B = FIR1(N,Wn,'high') designs a highpass filter. B = FIR1(N,Wn,'stop') is a
bandstop filter if Wn = [W1W2]. If Wn is a multi-element vector, Wn = [W1 W2 W3
W4 W5 ... WN], FIR1 returns an order N multiband filter with bands 0 < W
< W1, W1 < W < W2, ..., WN < W < 1. FREQZ Digital filter
frequency response. [H,W] = FREQZ(B,A,N) returns the N-point complex frequency
response vector H and the N-point frequency vector W in radians/sample of the
filter whose numerator and denominator coefficients are in vectors B and A. The
frequency response is evaluated at N points equally spaced around the upper
half of the unit circle. If N isn't specified, it defaults to 512.
For FIR filter enter A=1 and B =
h[n] coefficients. Appropriately choose N as 128, 256, etc
Window
|
Transition
|
Width Δ ω
|
Min. Stop
band
|
Matlab
|
|||||||||||||||
Name
|
Approximate
|
Exact
values
|
Attenuation
|
Command
|
|||||||||||||||
Rectangular
|
4 π
|
1.8 π
|
21db
|
B = FIR1(N,Wn,boxcar)
|
|||||||||||||||
M
|
M
|
||||||||||||||||||
Bartlett
|
8π
|
6.1 π
|
25db
|
B = FIR1(N,Wn,bartlett)
|
|||||||||||||||
M
|
M
|
||||||||||||||||||
Hanning
|
8π
|
6.2 π
|
44db
|
B =
FIR1(N,Wn,hanning)
|
|||||||||||||||
M
|
M
|
||||||||||||||||||
Hamming
|
8π
|
6.6π
|
53db
|
B= FIR1(N,Wn,hamming)
|
|||||||||||||||
M
|
M
|
||||||||||||||||||
Blackman
|
12 π
|
11 π
|
74db
|
B =
FIR1(N,Wn,blackman)
|
|||||||||||||||
M
|
M
|
||||||||||||||||||
Matlab Program:
%Method 2: the following program gives only the design of
the FIR filter for implementation continue with the next program (after h[n])
%input data to be given: Passband & Stopband frequency
%
Data given: Passband
ripple & stopband attenuation As. If As>40 dB, Choose hamming
clear
wpa=input('Enter passband edge
frequency in Hz'); wsa= input('Enter stopband edge frequency in Hz'); ws1=
input('Enter sampling frequency in Hz');
%Calculate transmission BW,Transition band tb,order of the
filter
wpd=2*pi*wpa/ws1;
wsd=2*pi*wsa/ws1;
tb=wsd-wpd;
N=ceil(6.6*pi/tb)
wc=(wsd+wpd)/2;
%compute the normalized cut off frequency
wc=wc/pi;
%calculate & plot the window
hw=hamming(N+1);
stem(hw);
title('Fir filter window sequence- hamming window');
%find h(n) using FIR
h=fir1(N,wc,hamming(N+1));
%plot the frequency response
figure(2);
[m,w]=freqz(h,1,128);
mag=20*log10(abs(m));
plot(ws1*w/(2*pi),mag);
title('Fir filter frequency response');
grid;
%generate simulated input of 50, 300 & 200 Hz, each of
30 points
n=1:30;
f1=50;f2=300;f3=200;fs=1000;
x=[];
x1=sin(2*pi*n*f1/fs);
x2=sin(2*pi*n*f2/fs);
x3=sin(2*pi*n*f3/fs);
x=[x1 x2 x3];
subplot(2,1,1);
stem(x);
title('input');
%generate o/p
%y=conv(h,x);
y=filter(h,1,x);
subplot(2,1,2);
stem(y);
title('output');
Result:
Enter
passband edge frequency in Hz100
Enter
stopband edge frequency in Hz200
Enter
sampling frequency in Hz1000
N = 33
Plots are as
in Fig.11.1 and 11.2
Inference:
Notice the maximum stopband attenuation of 53 dB from plot
11.2
%Design and implementation of FIR
filter Method 1
%generate filter coefficients for
the given %order & cutoff Say N=33, fc=150Hz, %fs=1000 Hz, Hamming window
h=fir1(33, 150/(1000/2),hamming(34));
%generate
simulated input of 50, 300 & 200 Hz, each of 30 points
n=1:30;
f1=50;f2=300;f3=200;fs=1000;
x=[];
x1=sin(2*pi*n*f1/fs);
x2=sin(2*pi*n*f2/fs);
x3=sin(2*pi*n*f3/fs);
x=[x1 x2 x3];
subplot(2,1,1);
stem(x);
title('input');
%generate o/p
%y=conv(h,x);
y=filter(h,1,x);
subplot(2,1,2);
stem(y);
title('output');
Result:
Plots are in
Fig.11.3 & 11.4
Notice that freqs below 150 Hz are
passed & above 150 are cutoff

FIR filter design using Kaiser
window:
disp('FIR filter design using Kaiser window');
M = input ('enter the length of
the filter = ');
beta= input ('enter the value
of beta = ');
Wc = input ('enter the digital
cutoff frequency');
Wn= kaiser(M,beta);
disp('FIR Kaiser window
coefficients');
disp(Wn);
hn = fir1(M-1,Wc,Wn);
disp('the unit sample response
of FIR filter is hn=');
disp(hn);
freqz(hn,1,512);
grid on;
xlabel('normalized frequency');
ylabel('gain in db');
title('freq response of FIR
filter');
Result:
FIR
filter design using Kaiser window
enter
the length of the filter = 30
enter
the value of beta = 1.2
enter
the digital cutoff frequency.3
FIR
Kaiser window coefficients
0.7175 0.7523 0.7854 0.8166 0.8457 0.8727 0.8973 0.9195
0.9392 0.9563 0.9706 0.9822 0.9909 0.9967 0.9996 0.9996
0.9967 0.9909 0.9822 0.9706 0.9563 0.9392 0.9195 0.8973
0.8727
|
0.8457
|
0.8166
|
0.7854
|
0.7523
|
0.7175
|
|
the unit sample response of FIR filter
is hn=
|
||||||
Columns 1 through 5
|
||||||
0.0141
|
0.0028
|
-0.0142
|
-0.0224
|
-0.0117
|
||
Columns 6 through 10
|
||||||
0.0133
|
0.0333
|
0.0277
|
-0.0072
|
-0.0495
|
||
Columns 11 through 15
|
||||||
-0.0614 -0.0140
0.0895 0.2097 0.2900
|
||||||
Columns 16 through 20
|
||||||
0.2900
|
0.2097
|
0.0895
|
-0.0140
|
-0.0614
|
||
Columns 21 through 25
|
||||||
-0.0495 -0.0072
0.0277 0.0333 0.0133
|
||||||
Columns 26 through 30
|
||||||
-0.0117
|
-0.0224
|
-0.0142
|
0.0028
|
0.0141
|
||

Implementation
of IIR filter
There
are two methods of stating the specifications as illustrated in previous
program. In the first program, the given specifications are directly converted
to digital form and the designed filter is also implemented. In the last two
programs the butterworth and chebyshev filters are designed using bilinear
transformation (for theory verification).
Method
I: Given the order N, cutoff
frequency fc, sampling frequency fs and the IIR filter type (butterworth, cheby1, cheby2).
Step 1: Compute the digital cut-off
frequency Wc (in the range -π < Wc < π, with
π corresponding to fs/2) for fc and fs
in Hz. For example let fc=400Hz, fs=8000Hz Wc = 2*π* fc / fs = 2* π * 400/8000
= 0.1* π radians
For MATLAB the Normalized cut-off
frequency is in the range 0 and 1, where 1 corresponds to fs/2 (i.e.,fmax)).
Hence to use the MATLAB commands wc = fc
/ (fs/2) = 400/(8000/2) = 0.1
Note: if the cut off frequency is in
radians then the normalized frequency is computed as wc = Wc / π
Step 2:
Compute the Impulse Response [b,a] coefficients of the required IIR filter and
the response type (lowpass, bandpass, etc) using the appropriate butter,
cheby1, cheby2 command. For example given a butterworth filter,
order N=2, and a high pass response, the coefficients [b,a] of the filter are
computed using the MATLAB inbuilt command ‘butter’ as [b,a] =butter(N, wc ,
'high'); Given the pass band (Wp in radians) and Stop band edge (Ws
in radians) frequencies, Pass band ripple Rp and stopband attenuation As.
Step 1:
Since the frequencies are in radians divide by π to obtain normalized
frequencies to get wp=Wp/pi and ws=Ws/pi. If the
frequencies are in Hz (note: in this case the sampling frequency should be
given), then obtain normalized frequencies as wp=fp/(fs/2), ws=fstop/(fs/2),
where fp, fstop and fs are the passband, stop band and sampling frequencies in
Hz
Step 2: Compute the order and cut
off frequency as[N,
wc] = BUTTORD(wp, ws, Rp, Rs)
Step 3:
Compute the Impulse Response [b,a] coefficients of the required IIR filter and
the response type as [b,a] =butter(N, wc , 'high');
IMPLEMENTATION OF THE IIR FILTER
1. Once the coefficients of the IIR
filter [b,a] are obtained, the next step is to simulate an input sequence x[n],
say input of 100, 200 & 400 Hz (with sampling frequency of fs), each of
20/30 points. Choose the frequencies such that they are >, < and = to fc.
2. Filter the input sequence x[n] with
Impulse Response, to obtain the output of the filter y[n] using the ‘filter’
command.
3.
Infer the working of the filter (low
pass/ high pass, etc).
MATLAB IMPLEMENTATION
BUTTORD Butterworth filter order selection.
[N, Wn] = BUTTORD(Wp, Ws, Rp, Rs)
returns the order N of the lowest order digital Butterworth filter that loses
no more than Rp dB in the passband and has at least Rs dB of attenuation in the
stopband. Wp and Ws are the passband and stopband edge frequencies, normalized
from 0 to 1 (where 1 corresponds to pi radians/sample). For example,
Bandpass: Wp = [.2 .7], Ws = [.1 .8] Bandstop: Wp
= [.1 .8], Ws = [.2 .7]
BUTTORD also returns Wn, the
Butterworth natural frequency (or, the "3 Db frequency") to use with
BUTTER to achieve the specifications.
[N, Wn] = BUTTORD(Wp, Ws, Rp, Rs,
's') does the computation for an analog filter, in which case Wp and Ws are in
radians/second.When Rp is chosen as 3 dB, the Wn in BUTTER is equal to Wp in
BUTTORD.
BUTTER
Butterworth digital and analog
filter design.
[B,A] = BUTTER(N,Wn) designs an Nth
order lowpass digital Butterworth filter and returns the filter coefficients in
length N+1 vectors B (numerator) and A (denominator). The coefficients are
listed in descending powers of z.
The cutoff frequency Wn must be 0.0
< Wn < 1.0, with 1.0 corresponding to half the sample rate. If Wn is a
two-element vector, Wn = [W1 W2], BUTTER returns an order 2N bandpass filter
with passband W1<W < W2.
[B,A] = BUTTER(N,Wn,'high') designs
ahighpass filter. [B,A] = BUTTER(N,Wn,'stop') is a bandstop filter if Wn = [W1
W2].
BUTTER(N,Wn,'s'),
BUTTER(N,Wn,'high','s') and BUTTER(N,Wn,'stop','s') design analog Butterworth
filters. In this case, Wn is in [rad/s] and it can be greater than 1.0.
Matlab Program (Design &
implementation)
%generate filter
coefficients for the given %order & cutoff %Say N=2, fc=150Hz, %fs=1000 Hz,
butterworth filter
[b,a]=butter(2, 150/(1000/2));
%generate simulated input of 100, 300
& 170 Hz, each of 30 points
n=1:30;
f1=100;f2=300;f3=170;fs=1000;
x=[];
x1=sin(2*pi*n*f1/fs);
x2=sin(2*pi*n*f2/fs);
x3=sin(2*pi*n*f3/fs);
x=[x1 x2 x3];
subplot(2,1,1);
stem(x);
title('input');
%generate o/p
y=filter(b,a,x);
subplot(2,1,2);
stem(y);
title('output');
Result:
Plot
is in Fig. 1, which shows that 100 Hz is passed, while 300 is cutoff and 170
has slight attenuation.
Note: If fp,fstp,fs, rp,As are given then use
[N,wc]=buttord(2*fp/fs,2*fstp/fs,rp,As) [b,a]=butter(N,wc);
If wp & ws are in radians
[N,wc]=buttord(wp/pi,ws/pi,rp,As) [b,a]=butter(N,wc);
If wc is in radians & N is given
[b,a]=butter(N,wc/pi);
For a bandpass output
wc=[150/(1000/2) 250/(1000/2)];
[b,a]=butter(4, wc);
Plot is in fig.2 where only 170 is passed, while 100 &
300 are cutoff.
 |
Fig1. Low Pass IIR filter
(butterworth) output
|
 |
Fig 2. IIR Output for Band Pass
(150-250 Hz)
|
Programs for designing of IIR
filters (for theory practice): BUTTERWORTH
%
Butterworth filter: Given data: rp=1, rs=40, w1=800,
w2=1200,ws=3600;
rp=1, rs=40, w1=800,
w2=1200,ws=3600;
% Analog frequency
aw1=2*pi*w1/ws;
aw2=2*pi*w2/ws;
% Prewrapped frequency
pw1 = 2*tan(aw1/2); pw2 = 2*tan(aw2/2);
%Calculate order and cutoff freq
[n,wc]= buttord (pw1,pw2,rp,rs,'s');
% analog filter transfer
[b,a] = butter(n,wc,'s');
% obtaining the
digital filter using bilinear transformation fs=1;
[num,den]= bilinear(b,a,fs);
% plot the frequency response
[mag,freq1]=freqz(num,den,128);
freq=freq1*ws/(2*pi);
m = 20*log10(abs(mag));
plot(freq,m);
grid;
Result:
rp = 1 rs = 40 w1 = 800 w2 = 1200

CHEBYSHEV FILTER:
%Given data
rp=1,rs=40,w1=800,w2=1200,ws=3600
%Analog frequencies
aw1= 2*pi*w1/ws;
aw2=2*pi*w2/ws;
% Prewrapped
frequency assuming T=1/fs pw1 = 2*tan(aw1/2);
pw2 = 2*tan(aw2/2);
[n,wc]= cheb1ord (pw1,pw2,rp,rs,'s');
[b,a] = cheby1(n,rp,wc,'s');
%obtaining the
digital filter using bilinear transformation fs=1;
[num,den]= bilinear(b,a,fs);
%plot the frequency response
[mag,freq1]=freqz(num,den,128);
freq=freq1*ws/(2*pi);
m = 20*log10(abs(mag));
plot(freq,m);
grid;
Result:
rp
= 1 rs = 40 w1 = 800 w2 = 1200 ws =
360

Generation
of sinusoidal wave using recursive difference equation
There exists different techniques to
generate a sine wave on a DSP processor. Using a lookup table, interpolation,
polynomials, or pulse width modulation are some of these techniques utilized to
generate a sine wave. When a slightly sufficient processing power is considered,
it is possible to utilize another technique which makes use of an IIR filter.
In this technique, a second order IIR filter as shown in
Figure 1 is designed to be marginally stable which is an undesirable situation
for a normal filtering operation. For this second order filter to be marginally
stable, its poles are located in the unit circle. After choosing the suitable
filter coefficients for the filter to be marginally stable, a unit impulse is
applied to the filter as an input at time t = 0, and then the input is
disconnected. Then the filter starts to oscillate with a fixed frequency.

The
difference equation of the second order filter shown in Figure 1 will be:

Where
F0 is the frequency, Fs is the sampling frequency and A is the amplitude of the
sine wave
Matlab Program
% Generation of sine
wave using recursive difference equation or IIRfilter
%fs = sampling rate
% t = time in sec
%f0 = frequency
% A =amplitude
A = 2;
t=0.1;
fs = 5000;
f0=50;
length = fs*t;
y = zeros(1,length);
impulse = zeros(1,length);
impulse(1) = 1;
% frequency coefficients
% difference equation of form y[n]= -a1
y[n-1] -a2 y[n-2] + b0 impulse[n]
% a1 = -2cos(2*pi*f0/fs), a2= 1, b0 =
Asin(2*pi*f0/fs)
a1 = -2*cos(2*pi*f0/fs)
a2 = 1;
b0 =
A*sin(2*pi*f0/fs)
y(1)= 0;
y(2)= b0;
for i=3:length
y(i)= b0* impulse(i)- a1*y(i-1) - a2* y(i-2);
end
plot (y);
title('Sinusoidal waveform')
xlabel('samples n');
ylabel('y(n)');

Generation of DTMF signals
Dual-tone Multi-Frequency (DTMF)
signaling is the basis for voice communications control and is widely used
worldwide in modern telephony to dial numbers and configure switchboards. It is
also used in systems such as in voice mail, electronic mail and telephone
banking.
A DTMF signal consists of the sum of
two sinusoids - or tones - with frequencies taken from two mutually exclusive
groups. These frequencies were chosen to prevent any harmonics from being
incorrectly detected by the receiver as some other DTMF frequency. Each pair of
tones contains one frequency of the low group (697 Hz, 770 Hz, 852 Hz, 941 Hz)
and one frequency of the high group (1209 Hz, 1336 Hz, 1477Hz) and represents a
unique symbol. The frequencies allocated to the push-buttons of the telephone
pad are shown below:
1209Hz
|
1336Hz
|
1477 Hz
|
||
697Hz
|
ABC
|
DEF
|
||
1
|
2
|
3
|
||
770 Hz
|
GHI
|
JKL
|
MNO
|
|
4
|
5
|
6
|
||
852Hz
|
PQRS
|
TUV
|
WXYZ
|
|
7
|
8
|
9
|
||
941 Hz
|
*
|
0
|
#
|
|
We will right the program to
generate and visualize the DTMF tones for all 12 Symbols.
Also we will estimate
its energy content using Gortzet’s Algorithm
The
minimum duration of a DTMF signal defined by the ITU standard is 40 ms.
Therefore, there are at most 0.04 x 8000 = 320 samples available for estimation
and detection. The DTMF decoder needs to estimate the frequencies contained in
these short signals.
One common approach to this
estimation problem is to compute the Discrete-Time Fourier Transform (DFT)
samples close to the seven fundamental tones. For a DFT-based solution, it has
been shown that using 205 samples in the frequency domain minimizes the error
between the original frequencies and the points at which the DFT is estimated.
At this point we could use the Fast
Fourier Transform (FFT) algorithm to calculate the DFT. However, the popularity
of the Goertzel algorithm in this context lies in the small number of points at
which the DFT is estimated. In this case, the Goertzel algorithm is more
efficient than the FFT algorithm.
Plot Goertzel's DFT magnitude
estimate of each tone on a grid corresponding to the telephone pad.
MATLAB
Program
% generating all 12 frequencies
symbol = {'1','2','3','4','5','6','7','8','9','*','0','#'};
lfg = [697 770 852 941]; % Low frequency group
hfg = [1209 1336 1477]; % High frequency group
f = [];
for c=1:4,
for r=1:3,
f = [ f [lfg(c);hfg(r)] ]; end
end
f'
% Generate the DTMF tones
Fs = 8000;% Sampling frequency 8 kHz
N = 800;% Tones of 100 ms
t = (0:N-1)/Fs; % 800 samples at Fs
pit = 2*pi*t;
tones = zeros(N,size(f,2));
for toneChoice=1:12,
% Generate tone
tones(:,toneChoice) = sum(sin(f(:,toneChoice)*pit))';
% Plot tone s
ubplot(4,3,toneChoice),plot(t*1e3,tones(:,toneChoice));
title(['Symbol "', symbol{toneChoice},'":
[',num2str(f(1,toneChoice)),',',num2str(f(2,toneChoice)),']'])
set(gca, 'Xlim', [0 25]);
ylabel('Amplitude');
if toneChoice>9, xlabel('Time (ms)'); end
end
set(gcf, 'Color',
[1 1 1], 'Position', [1 1 1280 1024])
annotation(gcf,'textbox', 'Position',[0.38 0.96 0.45 0.026],...
'EdgeColor',[1 1 1],...
'String', '\bf Time response of
each tone of the telephone pad', ...
'FitHeightToText','on');
% estimation of DTMF
tone using Gortzel's Algorithm
Nt = 205;
original_f = [lfg(:);hfg(:)] % Original frequencies
k = round(original_f/Fs*Nt); % Indices of the DFT
estim_f = round(k*Fs/Nt) %
Frequencies at which the DFT is estimated
tones = tones(1:205,:);
figure,
for toneChoice=1:12,
% Select tone tone=tones(:,toneChoice);
% Estimate DFT using Goertzel
ydft(:,toneChoice) = goertzel(tone,k+1); % Goertzel use 1-based indexing
% Plot magnitude of
the DFT
subplot(4,3,toneChoice),stem(estim_f,abs(ydft(:,toneChoice)));
title(['Symbol "', symbol{toneChoice},'":
[',num2str(f(1,toneChoice)),',',num2str(f(2,toneChoice)),']'])
set(gca, 'XTick',
estim_f, 'XTickLabel', estim_f, 'Xlim', [650 1550]); ylabel('DFT Magnitude');
if toneChoice>9, xlabel('Frequency (Hz)'); end
end
set(gcf, 'Color',
[1 1 1], 'Position', [1 1 1280 1024])
a
nnotation(gcf,'textbox', 'Position',[0.28 0.96 0.45 0.026],...
'EdgeColor',[1 1 1],...
'String', '\bf Estimation of
the frequencies contained in each tone of the telephone pad using Goertzel', ... 'FitHeightToText','on');

Interpolation,
decimation and I/D sampling rate converters
Multirate : Changing the Sampling
Rate of the Discrete Time Signal.
The process of converting a signal
from a given rate to a different rate is called sampling rate conversion.
Systems that employ multiple
sampling rates in the processing of digital signals are called multirate
digital signal processing systems.
Can
be accomplished in two ways:

Adv:
New sampling rate can be arbitrarily selected
Disadv:
Signal distortion is introduced by
·
D/A converter in signal
reconstruction
·
Quantization
effects in A/D converter
Changing
the sampling rate in digital domain --Multirate
Fundamental
operations in multirate signal processing are
1)
Downsampling (Decimation)
2)
Upsampling(Interpolation )
Decimation
is the process of decreasing the
sampling rate by a factor of M i.e.
from Fs to Fs / M
Down sampling : by a factor of M is achieved by discarding M-1 samples for every M samples.

This
combined operation of filtering and down sampling is called as decimation.

The
rate compressor reduces the sampling rate from Fs to Fs /
M
To prevent aliasing at lower rate,
digital filter is used to band limit the i/p signal to less than Fs/2M.
(new folding frequency).
Sampling rate reduction is achieved
by discarding M-1 samples for every M samples of filtered signal W(n).

INTERPOLATION
Process of increasing the sampling
rate of the signal by a factor of L i.e. from F s to LFs
Upsampling by a factor L means inserting L-1 zeros between two samples.


In matlab we can use function resample() to achieve
interpolation as well as decimation.
MATLAB
program:
% % m-file to illustrate simple
interpolation and
% decimation operations
% File name:
%
Fs=input('Enter Sampling
Frequency:'); % sampling frequency
I= input('interpolation factor:');
A=1.5; % relative amplitudes
B=1;
f1=50; % signal frequencies
f2=100;
t=0:1/Fs:1; % time vector
x=A*cos(2*pi*f1*t)+B*cos(2*pi*f2*t); % generate signal
y=resample(x,I,1); %
interpolate signal by 4
stem(x(1:100)) % plot
original signal
xlabel('Discrete time, nT ')
ylabel('Input signal level')
figure
stem(y(1:400)) % plot
interpolated signal.
xlabel('Discrete time 4 X nT')
ylabel('Interpolated output
signal level')
D=input('Enter the decimation
factor:');
y1=resample(x,1,D);
figure
stem(y1(1:50)) % plot
decimated signal.
xlabel('Discrete time nT/2')
ylabel('Decimated output signal
level')
Result
>> decimation
Enter Sampling Frequency:1000
interpolation factor:4
Enter the decimation factor:2


No comments:
Post a Comment